
-

机器人关节电机模组
立志于在高功率密度机器人核心零部件领域打造极致“微型+强悍”的伟大产品相较市场上大多数传统谐波减速机,自研自产的系列谐波减速器专注于更微小体积与自重产品的市场,其产品在体积和重量上均实现缩小,约减轻30%-50%,但扭矩却是同尺寸产品的2倍。
RMJ系列关节模组包含RMJ10-80、RMJ30-80和RMJ60-100三款产品,RMJ系列关节模组为公司推出的自主研发的机器人关节模组,能够让机器人的开发更高效、更简单,更节约成本。关节模组的设计结构紧密、安装简便,内含同服驱动器、电机端绝对值编码器、输出端绝对值编码器、无框力矩电机、制动器、精密谐波减速机等主要部件,为您省去大量机械电子器件选型、设计采购、组装的人力和时间成本,为机器人的快速上市助一臂之力.¥ 0.00查看更多
-

书法机器人
通过 Magician 机械臂与滑轨套件搭建一个春联写作系统,将字体文件导入到 Studio 软件中,通过软件的智能解析完成机械臂的运动控制指令,进而实现机械臂的运笔、蘸墨、抬笔、落笔、顿笔等动作。也可以通过蓝牙连接,在 iPad上自由创作,机械臂便能实时在春联上复现轨迹。¥ 0.00查看更多
-

码垛机器人
第一步:员工将产品按顺序方向放到输送机上,输送机将产品输送到末端输送机处由气缸进行定位并等待机械手抓取。
第二步:协作机械手抓取产品后,按码垛工艺在托盘上进行码垛。
第三步:完成一托盘的码垛任务后,转向另一垛继续码垛。
一个生产流程结束,进行下一个循环,实现不间断生产。¥ 0.00查看更多
-

柔性焊接机器人
¥ 0.00查看更多
-

智能档案库房管理机器人
以移动机器人为载体的智能档案库房管理机器人,建设智慧档案库房为目的,从实际应用出发,提供一种更好的稳定性和安全性的实体档案管理方法,快速实现档案存取、档案文件盘点、存取记录可追溯、借阅审批信息化、档案数据统计等,在档案日常管理中实现人与档案的完全隔离,响应国家有关部门“人档隔离”的号召。在国内首批次利用机器人技术实现无人化档案管控。通过对实体档案进行无人化、集约化管理,实现人档分离,有效解决人工管理涉密档案过程中存在的安全性、真实性问题。同时通过系统的自动化管理,能够实现大批量档案集中管理。主要应用于人事档案、卷宗、图纸、文献等涉密资料管理。构建以数据库为基础的电子档案、纸质实物档案、图像档案、音视频档案、专业档案等专项档案的档案管理信息系统。¥ 0.00查看更多
-

中高职教学PLC实训工作站
PLC 实训工作站主要用于学生实训学习使用。整个工作站包含电源模块 、PLC 模块、 输入模块、 输出模块、 HMI 模块、 运动控制模块。¥ 0.00查看更多
-
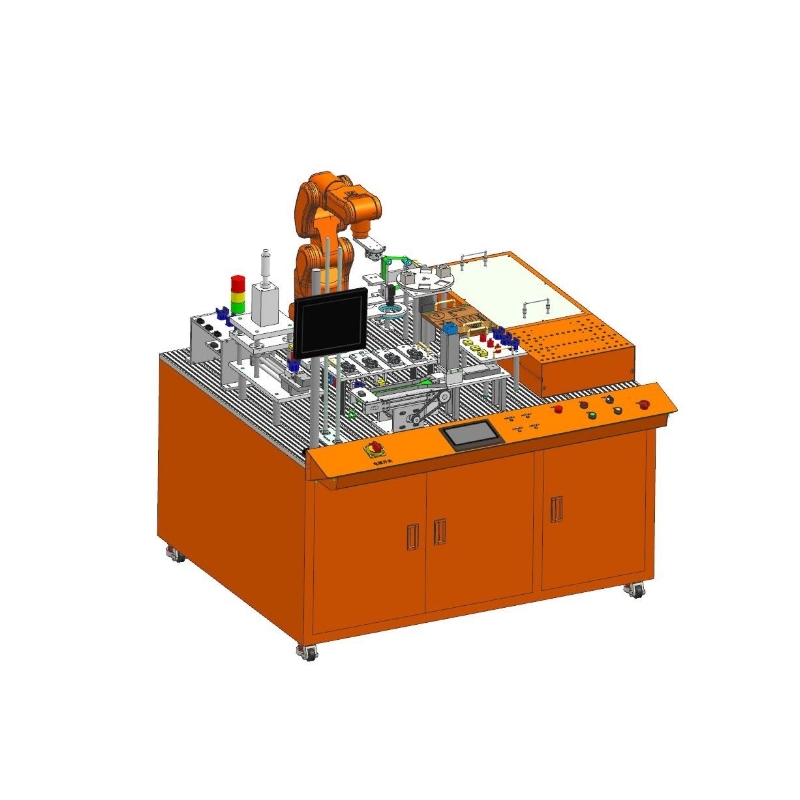
工业机器人操作与运维工作站
工业机器人应用编程实训系统采用模块化设计,灵活组合,可进 行实训考核、 技能鉴定、技能比赛、依次递进。平台融入工业机器人 技术、机械传动技术、多 种作业技术、传感技术、可编程控制技术、 总线通信技术、等先进制造技术,涵 盖工业机器人、机械设计、电气自 动化、等多门学科的专业知识。¥ 0.00查看更多
-

仿人五指灵巧手
仿人五指灵巧手采用拉线驱动设计,具有5个自由度和15个运动关节,可以模拟人手实现自适应包络抓取操作。握力稍小,速度快,典型的应用包括机器人末端执行器、猜拳、手势舞蹈、教育科研、体感互动。支持二次开发。¥ 0.00查看更多







