
-

码垛机器人
第一步:员工将产品按顺序方向放到输送机上,输送机将产品输送到末端输送机处由气缸进行定位并等待机械手抓取。
第二步:协作机械手抓取产品后,按码垛工艺在托盘上进行码垛。
第三步:完成一托盘的码垛任务后,转向另一垛继续码垛。
一个生产流程结束,进行下一个循环,实现不间断生产。¥ 0.00查看更多
-

柔性焊接机器人
¥ 0.00查看更多
-

智能档案库房管理机器人
以移动机器人为载体的智能档案库房管理机器人,建设智慧档案库房为目的,从实际应用出发,提供一种更好的稳定性和安全性的实体档案管理方法,快速实现档案存取、档案文件盘点、存取记录可追溯、借阅审批信息化、档案数据统计等,在档案日常管理中实现人与档案的完全隔离,响应国家有关部门“人档隔离”的号召。在国内首批次利用机器人技术实现无人化档案管控。通过对实体档案进行无人化、集约化管理,实现人档分离,有效解决人工管理涉密档案过程中存在的安全性、真实性问题。同时通过系统的自动化管理,能够实现大批量档案集中管理。主要应用于人事档案、卷宗、图纸、文献等涉密资料管理。构建以数据库为基础的电子档案、纸质实物档案、图像档案、音视频档案、专业档案等专项档案的档案管理信息系统。¥ 0.00查看更多
-

移动式协作机器人,复合机器人
移动式协作机器人可灵活控制协作机器人、移动底盘、视觉、末端夹爪等设备。多合一控制系统带来了简单便捷、安全可靠、扩展灵活、高效协同的全场景交互体验,可以灵活适应各种工作环境,省却繁杂操作,通过手眼脚配合来完成各种复杂的工作任务。¥ 0.00查看更多
-

果蔬采摘机器人,复合机器人
果蔬采摘机器人是融合人工智能和多传感器技术,采用基于深度学习的视觉算法,引导机械手臂完成识别、定位、抓取、切割、放置任务的高度协同自动化系统,采摘成功率可达 80%以上,可解决自然条件下的果蔬选择性收获难题,是智慧农业的标志性产品。果蔬采摘机器人由行走系统、视觉系统和采摘执行统组成。行走系统结合路面情况,选取履带式、轮式或轨道式等行走机构满足多种应用场景,采用视觉、激光、磁导航和 SLAM算法,集合超声、红外和激光等多种传感器,使其更能适应田间多种环境。视觉系统采用立体视觉定位技术,实现对果蔬大小、颜色、形状、成熟度和采摘位置的信息获取及处理;采摘执行系统采用多自由度机械手臂,通过合理的路径规划,完成抓取、采摘和放篮等多种任务。¥ 0.00查看更多
-

人机对弈机器人 下棋机器人 三合一机器人
机器人能司时与三名观众对弈五子棋、象棋、围棋。机器人运用高精度生重复定位技术,实现提子、落子功能。下棋机器人主要通过人工智能和串连机器人进行人机对弈的比赛,人机博弈就果人和机器人下模,利用人工智能的对串联机器人的轨迹规别来实现对弈,它是人工智能研究的一个重要分枝。¥ 0.00查看更多
-
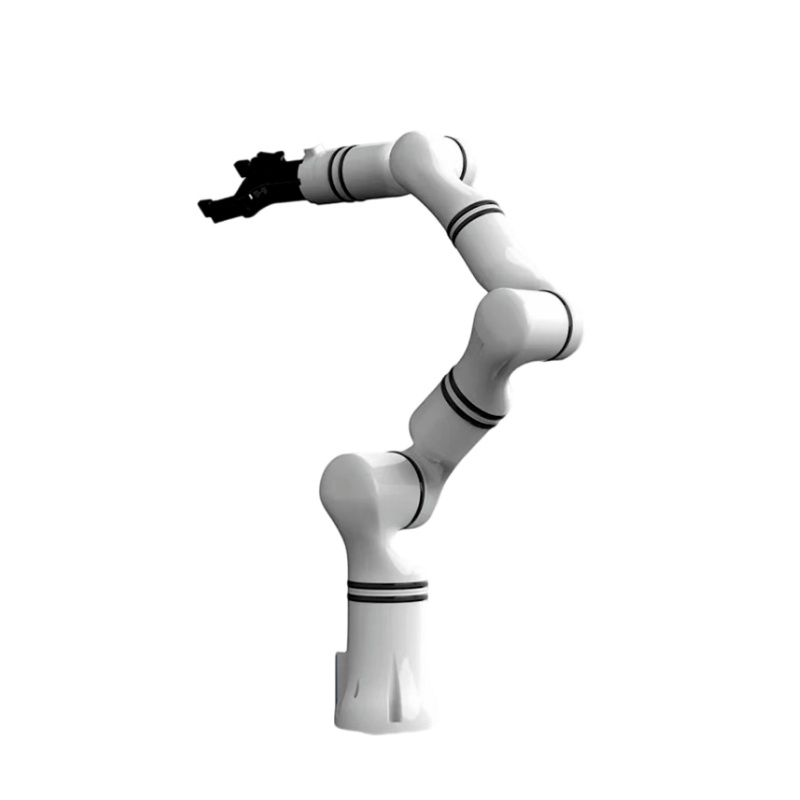
超轻量仿人协作机械臂
❥QD系列超轻量仿人协作机械臂有六轴和七轴两 个系列,可满足用户不同自由度的需求。
❥内置控制柜的机械臂总重量<7.2Kg,额定负载 达5KG,工作半径达610mm。
❥超轻细的特点更能适应各种狭小空间及移载相 关的各种复合应用场景。
❥仿人结构的设计能够更好的适应现有操作环境。 内置力矩反馈安全模块,触碰即停,实现人机安 全协作。
❥拖拽示教更轻松,人机交互更人性化¥ 0.00查看更多
-
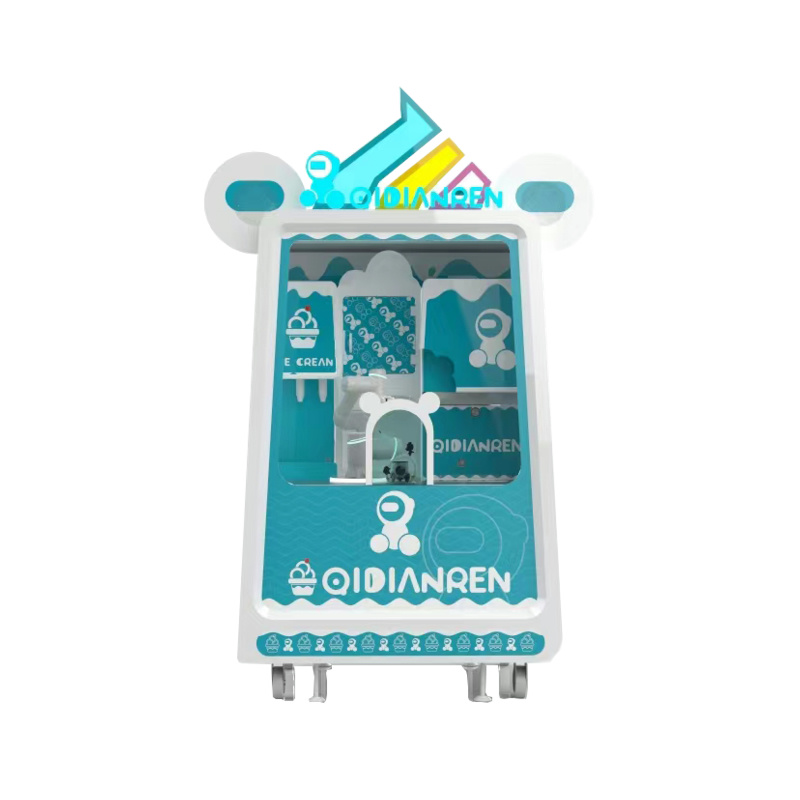
冰淇淋机器人
应用于酒店前台、网吧、影院大厅、高铁站、机场、会所、商业中心 等适合布点的环境,我们会是一台优质的自动贩卖机。无人值守,智能生 活不再遥远;多种口味,能满足大众需求;喜感的外形让生活多一份乐趣。¥ 0.00查看更多







